

RoboNav has been exploring many design options as they build the software, firmware, and mechanical foundations for their new competition, the University Rover Competition (URC). One such design decision the team has made is to use a drone to help simplify the autonomous portion of URC. The autonomous challenge is the hardest portion of URC,…
Tag: RoboNav

A Look at URC: RoboJackets’s Newest Competition
by Jonathan Spalten. RoboJackets has a wide berth of competitions its members participate in. In an effort to broaden our horizons further, RoboNav has made the decision to participate in the University Rover Challenge. Simply stated, URC’s challenge is to “design and build the next generation of Mars rovers that will one day work alongside…
The Computer Vision and Perception Techniques of the Autonomous Teams
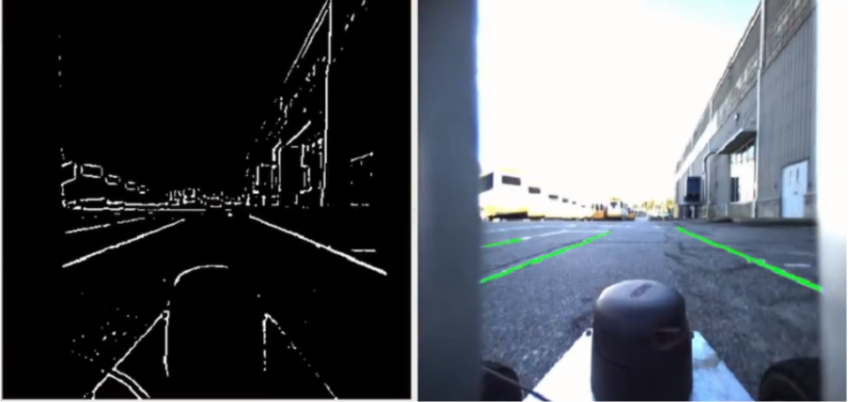
by Evan Bretl. One of the most critical functions of any autonomous vehicle is the ability to perceive its environment. Much of a typical robotics technology stack (mapping, planning, motion control) would be impossible without adequately sensing and comprehending the surroundings. Given the fundamental nature of machine perception to a functioning autonomous robot, RoboJackets software…
RoboNav – January 2021 Update
by Dallas Downing. The RoboNav team saw many changes in 2020. The spring semester saw the completion of the third iteration of Jessiii, the robot designed for IGVC (read more here). It also saw the team change its name from IGVC to RoboNav to reflect a shift in focus from a specific competition to autonomous…
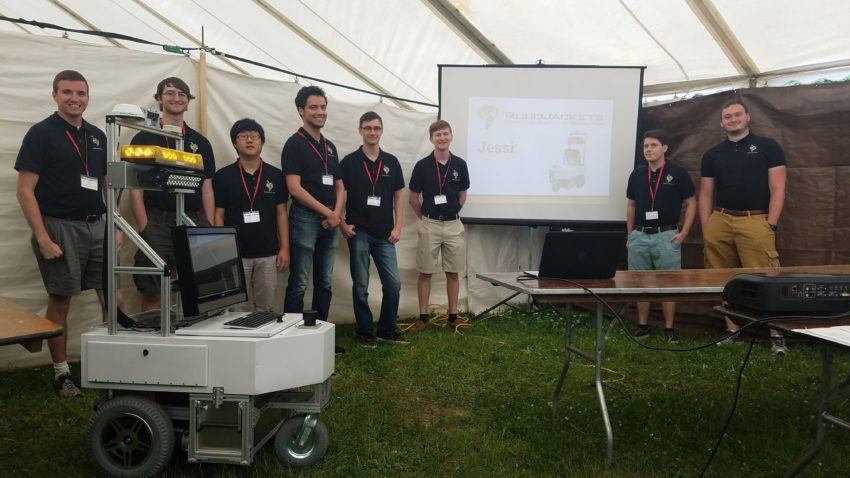
IGVC Retrospective
by Dallas Downing The Intelligent Ground Vehicle Competition (IGVC) was started in 1993 as a spin off of the International Aerial Robotics Competition. The goal of the competition was to create a robot that could navigate an outdoor obstacle course autonomously. The competition itself was meant to be a challenging, multi-disciplinary design project for undergraduate…

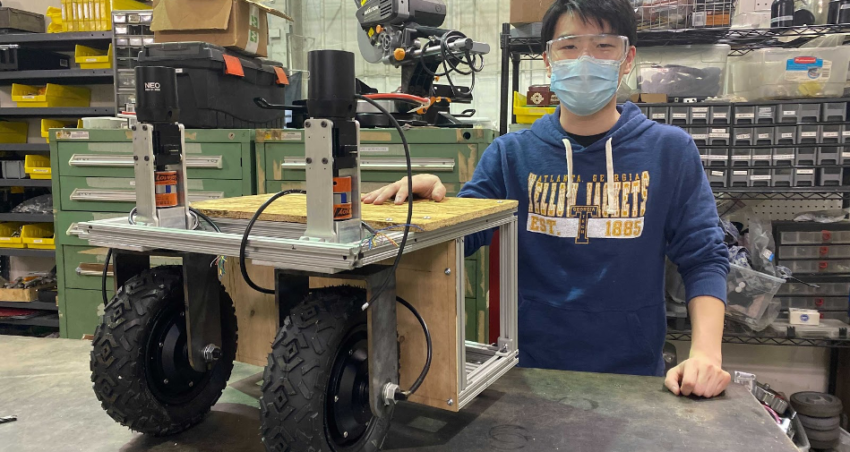
RoboNav – August Spotlight
RoboNav, formerly referred to as IGVC, is taking its drivetrain in a bold new (omni) direction. A typical IGVC robot in RoboJackets has two powered wheels and a caster to drive the robot through the course, but this year RoboNav is designing a swerve drive system. The main difference between a swerve drive and a…