Embark on a journey beyond Earth with RoboNav, our cutting-edge robotics team on campus! Join us in crafting a Mars Rover for the thrilling University Rover Challenge. As a member, you’ll gain hands-on experience in designing, building, and navigating rovers across treacherous Martian terrains to deliver supplies, service landing vehicles, and search for signs of life. Unleash your creativity and engineering prowess – become a part of RoboNav today! All majors are welcome!


The Competitions
University Rover Challenge (URC)
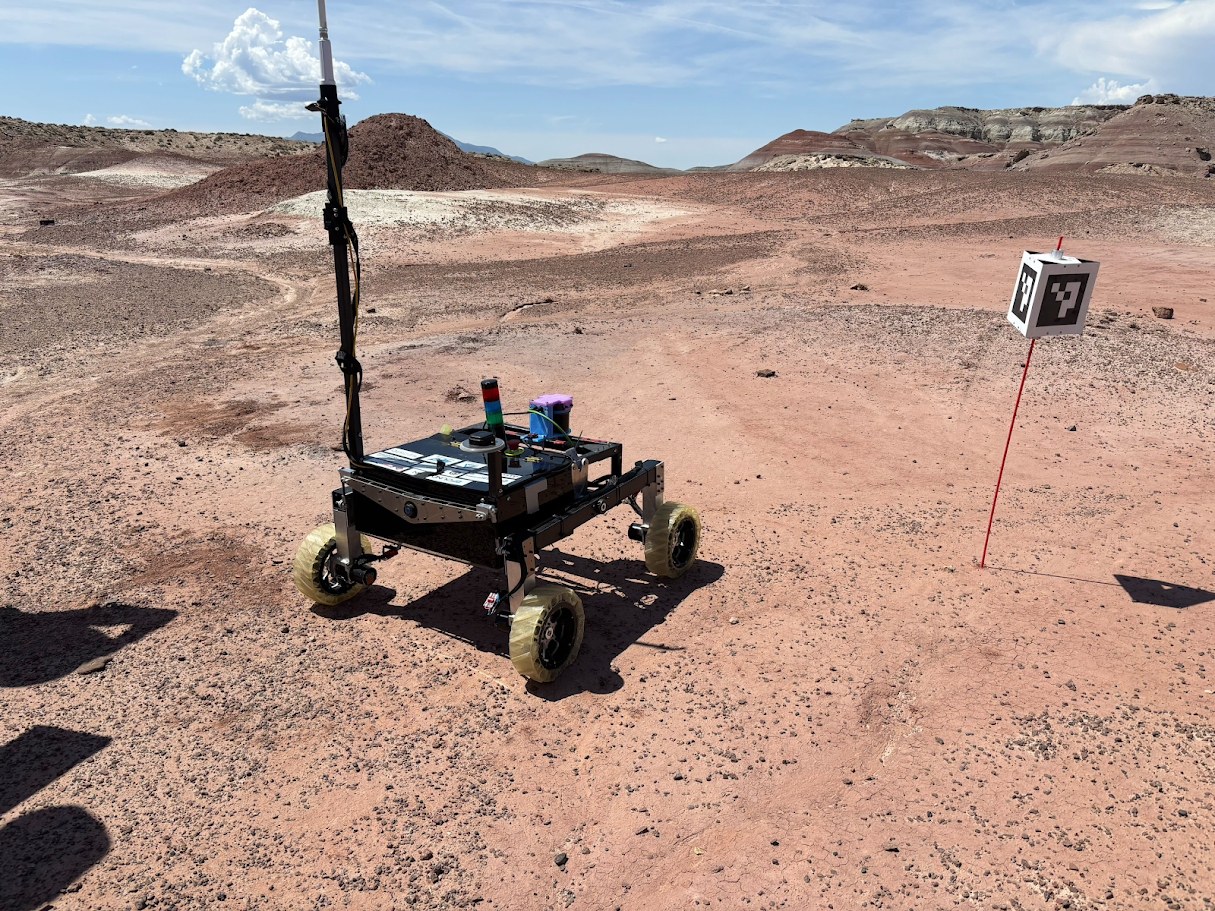
URC is a multi-stage competition which involves designing, building, and commanding a rover-style robot in both manual and autonomous challenges. The competition is meant to simulate the conditions faced by Mars rovers, and as such consists of several missions: determining the presence of life in soil samples, retrieving rocks and other items, servicing equipment, and autonomously navigating the surface of “Mars” (actually the deserts of Utah). Teams must qualify through various reports and video submissions before being invited to compete. The RoboNav team has competed in the 2024 and 2025 competitions, and we are in the middle of a two-year build cycle competing in the 2027 competition.

Team Information
Meetings
Sundays – 4 to 7 PM
Wednesdays – 6:30 to 9 PM
We meet in the Student Competition Center (575 14th St). If you are working in the machine shop or mechanical room you will need to wear closed-toe shoes and a t-shirt (no long sleeves). Bring a hair tie if needed.
Team Leadership
| Project Manager | Dylan Winer |
| Mechanical Lead (Spring 2026) | Cooper DelGandio |
| Mechanical Lead (Fall 2025) | Viti Chandra |
| Electrical Lead | Lindsey Zhang |
| Software Lead | Mrinal Jain |
| Science Lead | Madelyn Wayne |
| Drone Lead | Michael Lagana |
| MRC Lead | Ellie Pierburg |
Mailing List
robonav@lists.robojackets.org
Wiki Page
http://wiki.robojackets.org/RoboNav
Calendar Feed
Add to Google
Gallery