
by Dallas Downing
The Intelligent Ground Vehicle Competition (IGVC) was started in 1993 as a spin off of the International Aerial Robotics Competition. The goal of the competition was to create a robot that could navigate an outdoor obstacle course autonomously. The competition itself was meant to be a challenging, multi-disciplinary design project for undergraduate and graduate students. RoboJackets started attending the competition in 2003 with the robot Buzzbot, which makes it the longest-attended competition in RoboJackets’ history. Today we look back at what the RoboNav (previously IGVC) team has accomplished in the past three years and what the future holds for the team.
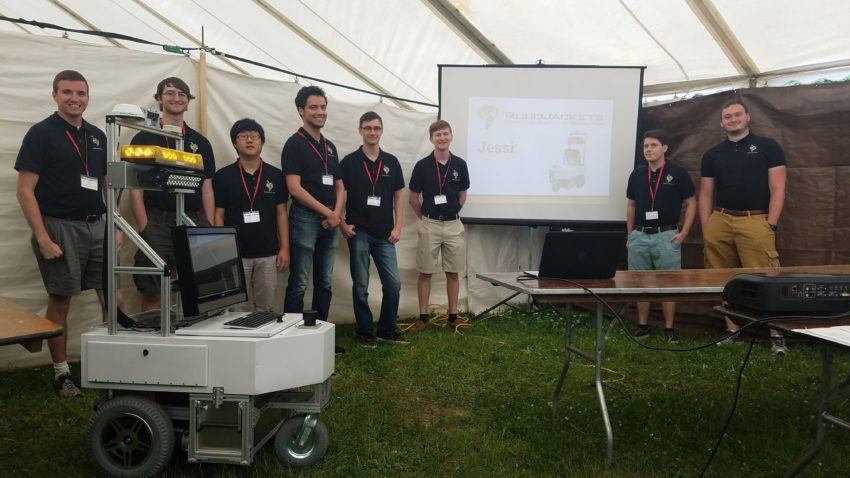
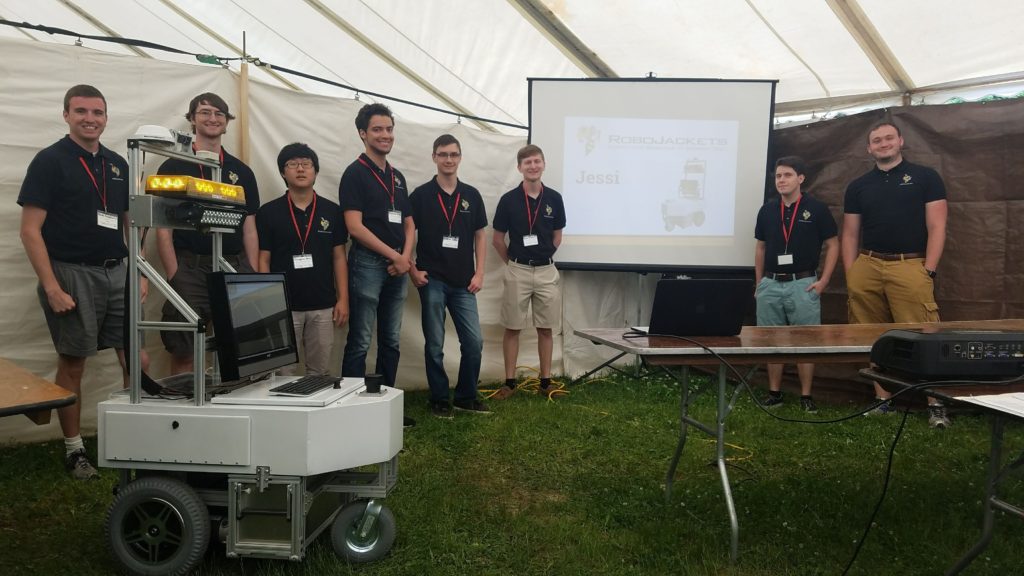
2019 was a very successful year for the RoboNav team. Jessii was awarded first place in the design competition, which put the team tied for third place overall. Jessii was the fourth robot to pass qualification (a requirement some robots never meet) and travelled over 150 feet (albeit in the wrong direction) on the official AutoNav course, a massive improvement over our previous performances. While RoboJackets has had varying degrees of success in the past, Jessii was the best performing robot for the team in all its time in IGVC. To understand how we got to this point, we first have to look back at the lowest point for IGVC in recent history: Jaymi.
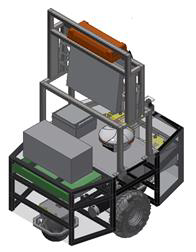
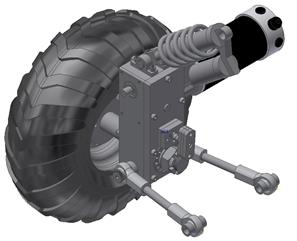
Starting in 2015, the team began designing the robot Jaymi for the 24th IGVC to be held in 2016. However, due to its complex design, shown above, it could not be completed for the competition and was instead planned to compete in 2017. During the production of Jaymi in 2016 and 2017, it became evident that the design was not just too complex but also inherently flawed. Jaymi featured two drive wheels at its midline and two caster balls at the front and back. The caster balls were 10-inch-diameter, steel balls, held in place with loose brackets and roller ball bearings. When driving, the weight of Jaymi was not enough to prevent the balls from coming out from underneath the frame, despite weighing over 200 pounds. The drive wheels featured custom gear boxes with a decoupling mechanism and suspension system. The gear boxes were originally not designed with the proper dimensions, and a lack of experienced machinists on the team made the fabrication process long and problematic. Since the frame was steel and was welded before the rest of the robot could be properly designed, making adjustments or additions to the robot was difficult or impossible. There were numerous, smaller choices that severely hindered the progress and performance of the robot. For example, the GPS was placed underneath the central, aluminum mast of the robot, which caused signal interference when the robot tried to localize itself.
Jaymi was never finished. Instead, less than 24 hours before leaving for the competition, a few brave members put together a makeshift robot, lovingly named Woodi, using scrap wood in the shop and supplies from Home Depot. Because of the delays in Jaymi’s production, the software team’s first and only time to test the software on a robot was at competition. It did not go well, to say the least. However, the team used this low point to create a new plan and approach that led to the team’s success today.

Jessi, Woodi’s successor, was designed differently from the beginning. After reflecting on the previous year, the team refocused their efforts on making a robot that was simple from top to bottom. The primary requirement was that the robot could be built in less than a year to allow the electrical and software teams ample time to test and iterate on their designs. In turn, Jessi was intended to be a minimum viable product: meet the minimum size requirements, keep the controls to a simple differential drive with one caster wheel, use aluminum extrusion for the frame to simplify manufacturing, keep the design as modular as possible to allow independent systems to be modified without affecting the others, use off-the-shelf gearboxes and motors, and ensure everything could be waterproofed (for the inevitable Michigan rain). By sticking to these basic principles, the team was able to design and manufacture a remarkably elegant robot in a fraction of the time it took to (almost) make Jaymi. Jessi had significantly fewer failure points than Jaymi and certainly demonstrated the importance of keeping designs simple. As with any complex project, there were challenges along the way, but fueled by the failure of the previous year, the team powered through them. And the effort paid off. At the 26th IGVC (2017), Jessi ended up in second place in the design competition, coming behind first by only 11 points (out of 480).

This was, of course, only the beginning. Jessi’s simple and modular design meant that iterating would be easy. Since Jessi was stable mechanically and electrically, it gave the software team plenty of opportunities to test new software changes without waiting on the mechanical or electrical team. With Jessii, the mechanical team’s goal was to improve the accessibility and serviceability of the robot. Electrical’s goal was to make the electrical system more robust and to begin designing more diagnostics capabilities to identify problems more easily. Software’s goal was to improve the performance of the mapping and planning algorithms. In particular, the team was able to significantly improve the vision of Jessii by using a U-Net Convolutional Neural Network and planning with the Field D-Star (D*) Path Planning algorithm. Once again, there were challenges along the way (including a burned out power supply), but the team soldiered on and produced the most successful IGVC bot for RoboJackets to date, winning first place in the design competition and third overall.

This past year’s efforts (2019-2020) has been focused on a final revision of Jessi: Jessiii. While there was final retouching needed on the mechanical side of things, the principal focus has been on improving the electronics, including the firmware, and continuing to improve the software. This year saw significant progress on the diagnostics system and other systems improvements, such as hot-swapping capabilities for the electrical system. Unfortunately, due to COVID-19, the RoboJackets’ shop was closed and the 28th IGVC was cancelled. While Jessiii still has yet to compete, the RoboNav team is working on bigger and better projects to come.
After the team’s success with Jessi and Jessii at IGVC, the team intends to enter a more competitive environment. RoboJackets aims to promote, educate, and advance in the field of robotics, and, to keep in line with the mission, RoboNav is accepting a bigger challenge for a greater learning experience. Jessi’s design has been retired and the team is building on their experience with the next IGVC robot: Swervi, a four-wheeled, swerve drive robot that is able to move in any direction, a competitive edge in a navigation challenge. Though the design is more complex, the team has learned a great deal from their past experiences and plans to tackle this challenge with greater insight, better support from the organization, and a deeper understanding of the design principles that led to their previous success.
In April/May 2020, the IGVC team also elected to change its name to RoboNav. These changes reflect the team’s intentions to expand into another autonomous navigation challenge. Within the next two years, RoboNav plans on participating in the University Rover Challenge (URC), a competition aimed at creating the next generation of Mars rovers. For now, RoboJackets will continue to compete in IGVC and URC while we have the manpower and resources. It is clear that IGVC and Jessi have created the foundation for RoboNav’s future goals. Both will forever hold a special place in RoboJackets history.
You can read the design reports for Jessi (IGVC 2018) and Jessii (IGVC 2019) from the IGVC site for more details on their designs. You can also find the results for the competition on the IGVC site for each year.