
Every year, BattleBots works on a great number of robots, ranging from the fleet of 3lbers that the new members do as a training project, all the way up to 30 lb combat robots to take to competitions all over the United States. This year, BattleBots has four large robots that their team members are working on. Notably, this year the team is considering taking their robots to one of the Norwalk Havoc Robot League (NHRL’s) many competitions, tentatively aiming for the March 18th Competition. This year, there are two robots that are new concepts, and two robots that are iterations on previous robots.

The first robot we’ll be covering is Anxieti, a 30 lb undercutter. Anxiety uses a weapon with a large diameter and a single tooth in an effort to deliver heavy blows to enemy combatants. Additionally, Anxieti uses angled armor that makes a consistent 30 degree angle to deflect blows from enemies. According to Lucas McCarty, the bot lead, one of the other major design choices being made is eliminating puzzle fits (i.e., tabs that fit into cutouts in plates, often used in RJ combat robots).
This decision was made after feedback from Chris (Carlson) from Deep Six which went against [the way RJ had been designing bots). After that design review, our chassis team decided to rework their entire design in order to remove internal framing and puzzle fits leading to more space and weight efficiency. It remains to be seen whether this description will pay off in battle, but if it does, it could mean an exciting new trend for future RoboJackets creations.

The next major milestone for the team is finishing the CNC milling of their corner brackets.

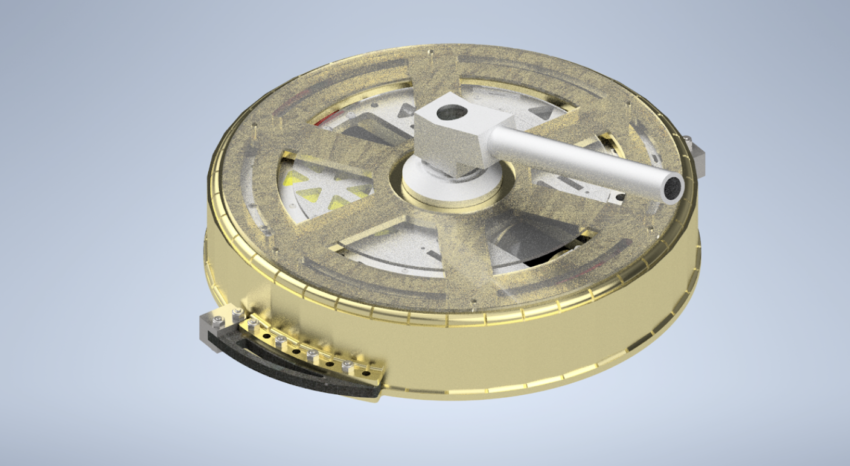
The next robot is Chonkiii, the third iteration of a 30 lb shuffling shell spinner. Because it uses a shuffling system instead of wheels, it is eligible for a 150% weight bonus, meaning it will actually weigh 45 lbs. The major improvements with its third iteration are improving traction in the shuffling system, implementing a self-righting mechanism, and more durable shells.
To improve traction, the team is planning to use spikes that dig into the ground. “To successfully compete with the speeds of the other robots, we need more traction between the ground and our shuffling feet system,” said Sydney Baker, the bot lead on Chonkiii. She continued: “So, the previous method of hot glue will be experimentally tested against new specially applied spikes.”
The self-righting mechanism has taken the form of a bent bar affixed to the center of the robot. Sydney outlines how it works: “the self-righting bar will extend up and outward from the robot, acting as a lever arm to push against the ground and shove it back up right.” Finally, the team is planning to manufacture two shells, “to counter specific bot types and encourage glancing hits from each. One shell with a 45 degree slant to counteract undercutters and the other with 90 degree slant to face off against verticals and drums.” Additionally, Sydney notes: “The shell will also be manufactured out of a harder steel, AR 400, to prevent large dents to the shell.”

The team has completed many waterjet parts and CNC milled central components of the shell support system.

Next up is Hockii, a 15 lb meltybrain (IE, a robot whose entire body spins and moves laterally by changing the speed ratios between its two wheels). Hockii is seeing some major changes in its third iteration, says Steven Zhao, robot lead:
For mechanical, Hockii is going through a major overhaul. We’re increasing the diameter of the chassis while also shortening the height. Last year we learned that any loose wires were prone to breaking free after hits, so we’re adding a clamshell to house all the internal electronics and wiring. Since the competition we’re planning on attending has wooden floors, we’re also changing to titanium wheels for more grip. Finally, we’re switching to sensored motors for greater control at low speeds, and changing to VESCs to be able to fully utilize the sensored motors.

Electrical is also seeing some major changes, including “reducing the size of our PCB by a lot, as we are no longer using an IR sensor, and we’re adding a magnetometer to get a better estimate of our position.” Finally, software is making changes to address the electrical changes, as well as: “testing an extended Kalman Filter to hopefully improve the estimate of our position further. We are also planning on fixing the translational drift code for control over Hockii while it is spinning.”
The mechanical and electrical design are completed and awaiting components to begin full manufacturing. The team is currently testing the software improvements.

The final large robot BattleBots is working on this year is Tsunami, a 30 lb beater bar. Like Anxieti, Tsunami has a large weapon to deliver hard hits to enemy robots. “Our bot will be tilted upwards to accommodate the large weapon diameter without needing massive wheels,” said Knute Broady, the bot lead for Tsunami. He also mentioned a few other design features worth highlighting:
Our side rails are made of 7/8th in aluminum, which is comparatively much thicker than we normally use. We used FEA to remove material while retaining as much strength as possible, and are using CNC machining to make the parts. We’re also incorporating some materials that RJ hasn’t used much in the past few years. Our outer armor is mostly UHMW, and our top and bottom plates are Titanium.
Tsunami has done as much manufacturing as they can with the materials they had on hand, and are waiting to receive parts.
RoboJackets has hit the ground running this semester with manufacturing the big bots, and most are only seeing delays in getting parts that they’ve ordered. The team is looking forward to another generation of robots competing at NHRL for the first time.