


Some alumni may remember that RoboJackets has brought combat robots and RoboRacing robots, including Bigoli, out to Colorado to compete at Sparkfun AVC (Autonomous Vehicle Competition). Sparkfun has since stopped hosting that competition, but this past May a new AVC took its place: the Angry Vehicle Competition. This new AVC only has combat robotics in 6 weight classes: plastic ant (1 lb, with limited materials), antweight (1 lb), beetle (3lb), hobbyweight (12 lb), featherweight (30 lb), and sportsman (30 lb, with kinetic energy limits). This year, RoboJackets competed at AVC with three featherweight bots: Anarchi, Chonkii, and Binari.

Anarchi is a horizontal spinner with an asymmetric bar weapon. Anarchi had 2 losses and one win. Anarchi’s first fight was against Wedge Ham, a wedge bot that was able to control the match effectively and went on to win the event in first place. Anarchi lost by tap-out after it was unable to move. Its second fight was against Dragonfruit, a Huge-style vertical bar spinner. Anarchi won this fight after it knocked one of Dragonfruit’s large wheels clean off, prompting a tap-out. Anarchi’s final fight was against Crippling Depression. Unfortunately, by this point in the competition, Anarchi was havins issues with its drive systems and lost the fight by knockout after getting slammed into and stuck in the corner of the arena.
We reached out to Brian Naing, one of the builders of Anarchi and the current BattleBots PM for commentary on Anarchi. Brian was pleasantly surprised at Anarchi’s single victory, because the team was down to the wire on completing the bot:”The first real battle was finishing the bot in the first place as we only got our bot’s weapon up and spinning an hour before we had to leave the shop for the airport.”
Overall, Brian was pleased with the durability of the chassis, but saw many areas for improvement in the robot’s serviceability. Of the chassis, Brian said “[it] was a brick which held together well enough to take the constant ramming from a wedge bot (that later went on to win AVC) while being low to the ground enough to be virtually invincible to an over-cutter bot we went up against.” The weapon “spun-up decently well at first but would have probably been more powerful with some modifications.”
The major lesson that the team learned was to focus more on the details: “the main things we learned at AVC were that small design details can literally make or break the bot and that it’s more important to make sure the basic subsystems of the bot are designed well to be reliable.” Additionally, Brian noted that repairability was a major area for improvement: “we had not designed the bot with the intention of these components being replaced when damaged which led to a design that required half of the bot to be disassembled in order to just access and repair the gearboxes.”
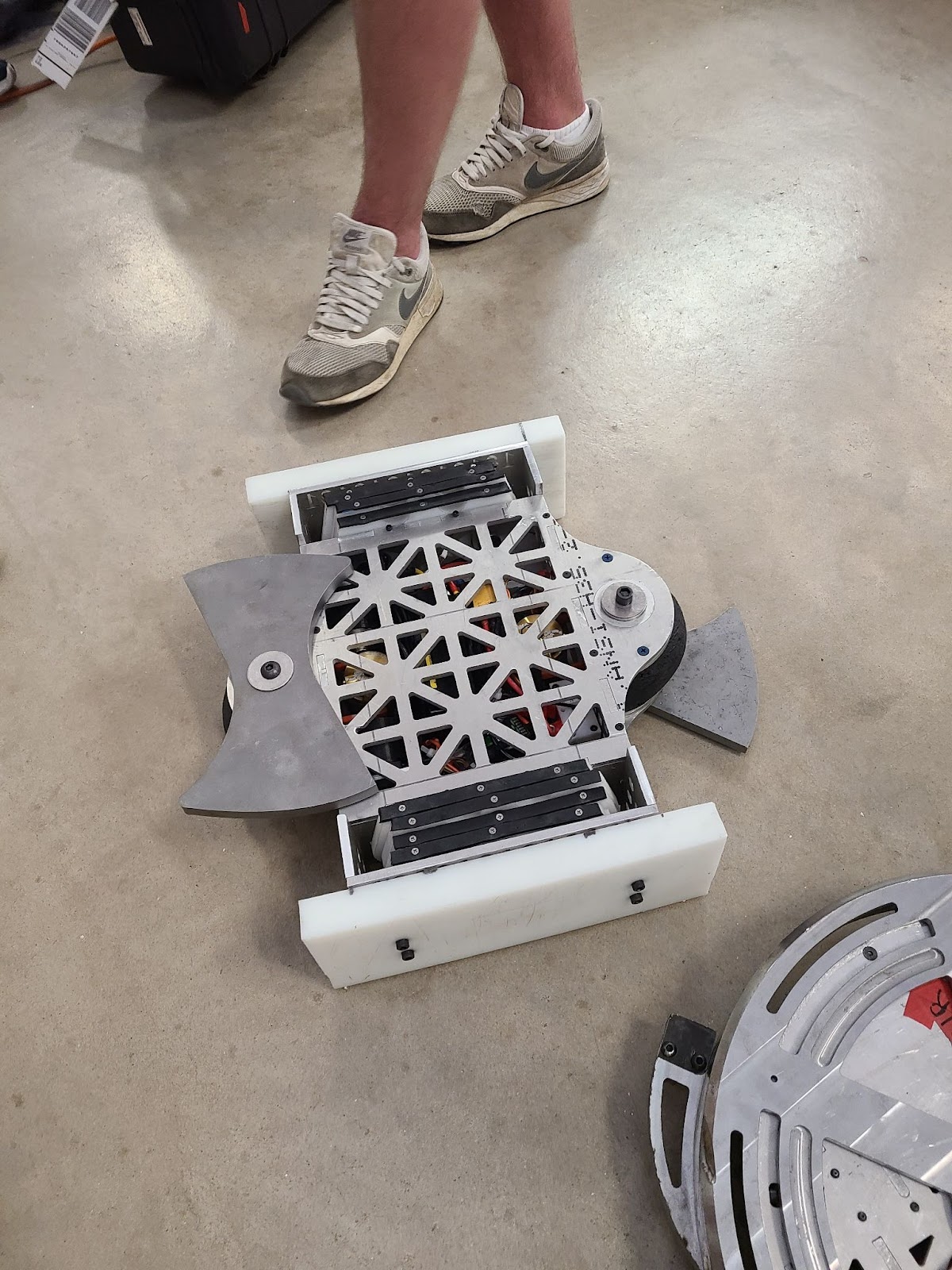
Next up is Binari, a shuffling undercutter with two independently driven weapons, enabling the robot to undercut no matter its orientation. Binari unfortunately had a 0-2 win/lose ratio. Its first fight was against Crippling Depression, another undercutter. It delivered some solid hits to Crippling Depression, but Crippling Depression was able to land a hit on the bearing system on one of Binari’s weapons, disabling one of the weapons for the rest of the competition.
Binari’s second fight was against HUHMWPE DUHMWPE, a horizontal spinner made primarily of UHMWPE. HUHMWPE DUHMWPE was able to tear several pieces of Binari off, including essential shuffler plates, ultimately resulting in a KO.
We reached out to Knute Broady, Binari’s bot lead for comments. Although Binari saw stiff competition, Knute said, “we did have a bot that worked as we intended when we entered into the arena, and in many ways that is a success.” The big thing that Knute was proud of in the design was the shuffling system:
The part of the design that was the most work, the shufflers, actually ended up working pretty darn well. The main thing we struggled with at the comp was an ESC issue that should have simply been avoided, but in the end they were maneuverable and robust. We suffered a ton of damage in our first match, but despite bent plates and shafts we were able to get the shufflers to work again which says a lot about them as a design. In fact, the robot could still move even after the side plate had been completely ripped off.
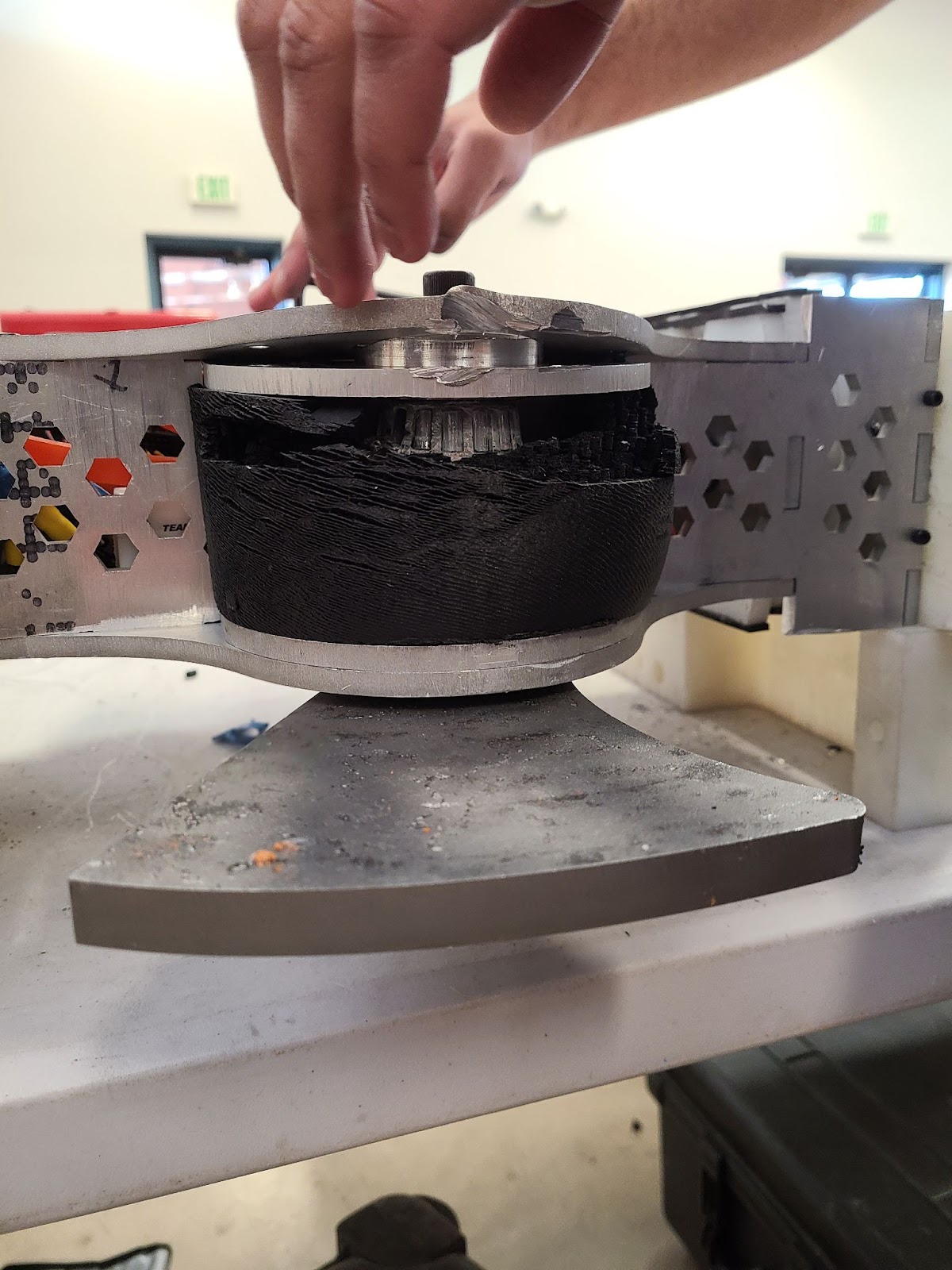
According to Knute, the major issues with the robot’s design was in the weapon systems: “The Achilles heel of the Binari design actually turned out to be the weapon belts.” Binari used polyurethane weapon belts that were shredded by internal features (including the weapon motor that had ribs) and caused multiple weapon failures. Additionally, “our ‘overcutter’ [IE, the second weapon that was mounted above the robot] was too high and didn’t allow us to hit either of the bots we were facing … Our bot could actually accommodate a double undercutter, however we were never able to try it in competition because of sheared bolts after our first match.”
Similar to Anarchi’s team, Knute’s big takeaway was to refocus on the basics:
Overall, Binari had a lot of good ideas, but it’s hard to execute such an ambitious bot when we missed on a lot of the basics. I think the failure of Binari also reinforced focusing on an engineering first approach rather than a ‘it should work’ approach that it’s easy to slip into in battlebots. It wasn’t that fact that we had 2 weapons or shufflers that caused us not to be successful, it’s the little things we missed along the way.

Last up is Chonkii, a shell spinner shuffler. Chonkii is back after its last appearance at Motorama, this time with a 1-2 win/lose ratio. Chonkii’s first fight was against Booster, a flipper. It was able to deliver a handful of hard hits on Booster, including one that bent its flipping forks, resulting in a win by tap-out. Chonkii’s second fight was against Wedge Ham. Wedge ham was able to push Chonkii around, ultimately pushing Chonkii up onto the side of the arena. It got stuck there and lost by KO, despite its best efforts to spin itself free. Chonkii’s last fight was against Yahoo, a rematch after Yahoo flipped it over and KO’d it at Motorama. Unfortunately, Chonkii ran into drive issues in the fight, and lost by KO, once again, flipped up on its back.
We reached out to Mihir Nagaraj, Chonkii bot lead for comment. The major change the team made since Motorama was changing how their shell was constrained: “We fixed the bearings and shaft constraints that broke at motorama causing our weapon to stop spinning. Our rematch against Yahoo showed that these changes (changing the bearing material to steel lathing a slot into the center shaft) fixed this issue.”
Mihir attributes the electronics failures to poor electronics securing: “Our weapon system worked well but we learned that our electronics need to be better secured as our drive system lost power and lost our last fight.” The major lesson learned was that the team needs to pick higher quality materials (E.G. steel for bearings) to be more competitive.
Overall, the team had some good fights and learned some good lessons at AVC, summed up by one of Brian’s comments:
The main things we learned at AVC were that small design details can literally make or break the bot and that it’s more important to make sure the basic subsystems of the bot are designed well to be reliable first before trying to implement a novel, game-changing design or pumping as much energy as possible into a giant weapon. I think Anarchi and other teams as well have also taken home the idea of designing for reliability and repairability like many other teams at AVC did. Any bearing will always have the chance of breaking upon an impact meaning that the only countermeasures are trying to spec the bearing right, making it easier to pull out if you have to, and bringing a bunch of spares. I think this, along with alot of other small and big things Robojackets has learned from this competition will be immensely valuable as we build new and better bots next year.