
by Jonathan Spalten.
A big part of RoboJackets is ensuring that new members are able to contribute in meaningful ways early on in their RoboJackets career. This month, we’d like to feature some of the projects that new members are working on as a part of RoboWrestling, the newest team in RoboJackets dedicated to robotic Sumo competitions.
There are three projects we’d like to feature: an entirely new mechanical robot design, dubbed Spici, a radio board to enable more advanced communication with deployed robots, and a simulator for testing robot code without a mechanical platform.
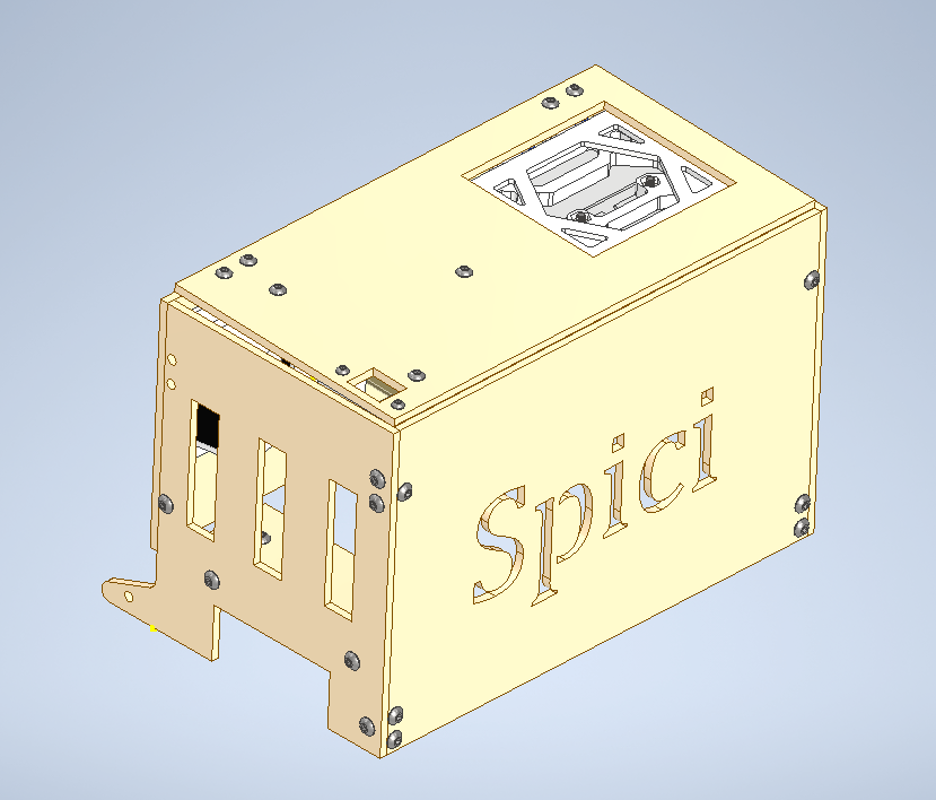
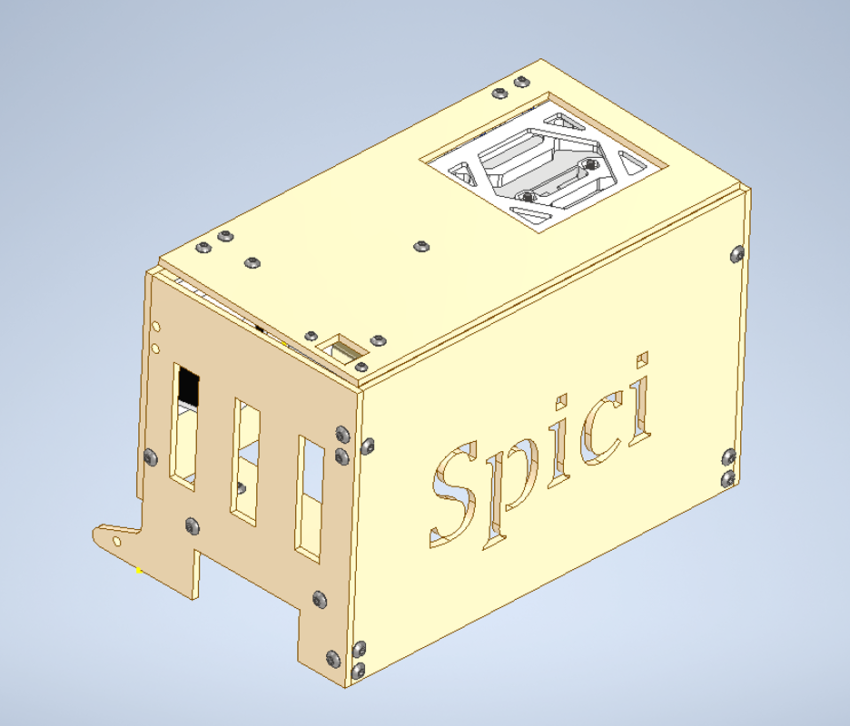
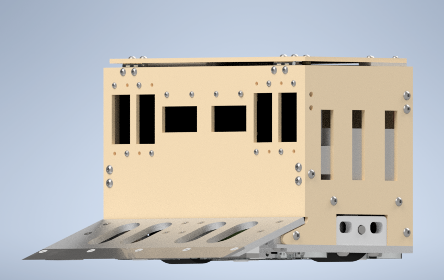
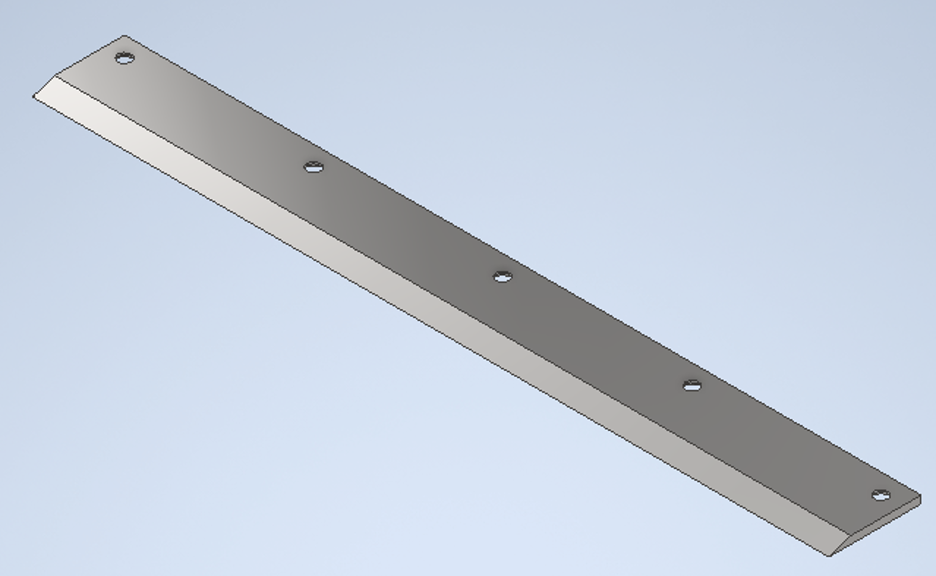
Spici (like “Spicy”) is the newest RoboWrestling robot. Jason Katz, recently elected to the Mechanical Lead in RoboWrestling, was involved with designing the outer plastic shell for the robot. Most RoboWrestling robots have an outer shell that provides structure to support various electronics, including the sensors the robots use to identify and track enemy robots. One of the major innovations with Spici is the introduction of a hinged plow. The advantage of a hinged plow is that if an enemy robot gets under the plow, it doesn’t tilt the entire robot, shortening the lever arm and making it harder to push the robot around. Jason designed the very tip of the plow, essentially a steel knife blade that wedges under opponents. The team has made a lot of progress over the year, including completed CAD for the new robot. The team has just now started to machine some of the essential parts for assembly.
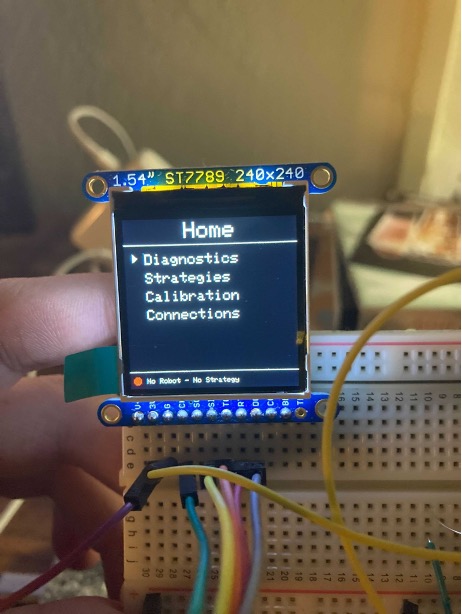
Jadon Grossberg and Jacob Nickles are working on the radio boards. The radio board is a separate electronic device with an LCD screen that communicates with corresponding radio boards in the autonomous robots that the team fields at competition. Jadon outlines three features they are looking for: “ability to look at diagnostic statistics from each robot, changing strategies at competition, and calibrating the [sensors on the] robots.” In sumo competitions, it is desirable to be able to change which strategy the autonomous robot will engage in to adapt to information you have on your opponent. Without this radio board, changing strategies would require plugging into the control board and manually uploading new code to it. With this board, the strategy change can be much quicker and could even be done between points in a single sumo match. The other two features are also valuable for maintenance and troubleshooting of the robots and will save effort.
The team has developed the basic diagnostics tools, but the team is waiting to fine tune them when they have the radios communicating fully. The team currently has two robots that use different microcontrollers, one using an Arduino Pro Micro, and another using a Teensy 3.6. Because the radio board uses an Arduino, it was relatively easy to get the two boards to communicate, but, as Jacob says, “the Teensy seems to have a few unique issues believed to be rooted in its computation speed and register access, so we are going to debug the next time we meet.”
Jacob and Jadon operate relatively independently in the project execution. Jadon says “I’ve relied pretty heavily on the guidance of mentors for electrical projects like soldering PCBs and checking for shorts. Programming projects have been much more independent and for those, older members feel much more like peers [as opposed to mentors].”
Jacob is also making major contributions to the third project: the sumo simulator. The basic goals of the project are to model physics interactions between two robots, test out interchangeable strategies and sensor configurations, and adjust starting parameters in each match, such as position, rotation, and simulation speed. The team has made good progress and has functional collision detection “that produces either a deadlock when the two hit head on or a victory when one strikes the other from the side.” These two situations are the most common in sumo competitions. When two sumo robots meet head to head, they engage in a push of war that often results in restarting the point, but when one robot attacks the other from the side or back, the attacker usually takes the point. This collision detection system reflects that common behavior. Different strategies are defined by a line that represents the initial motion the robot takes. To change strategies, that line can be changed and tested against any number of probable enemy strategies. The team has also implemented a method to try out different numbers of sensors that are arranged based on a robot class, but the main focus of testing thus far has been the physics and strategies.
There are also future plans for the robot. Jacob gave the following list of future improvements the team is interested in making:
- Changing our implementation of collisions to better include the frictional resistance during a hit
- The previous plan may require an overhaul of our current physics model for the robot as well
- Creating new opening gambit strategies [EG, intentionally getting out of an opponent’s way to let them drive off the edge or present their side to you] to get the upperhand in a match
- Test and create a system to make different robot selection easy
- Create simulated versions of Gucci, Kirbi, and Spici to test with
- Legal starting position checking when inputting match parameters
Jacob says that the project is “in a good position,” citing the completed collision detection system.
These projects all represent a high-impact contribution to RoboWrestling, either with a new version of a sumo robot or the development of tools that will ensure future success. The radio board and simulator directly address problems that have haunted our Sumo teams in the past, specifically in making our robots more adaptable and allowing our software team to engage in more testing and iteration before the robots are complete. Formerly, the only testing opportunities our Sumo teams have gotten are the competitions, so this simulator represents a major opportunity for us to test strategies before they face down their opponent, and the radio board enables us to readily adapt to opponents during a match.