
by Jonathan Spalten.
Another newsletter; another opportunity to feature RoboJackets members who take part in robotics or robotics-adjacent research at the Institute. This month, like the last two, we’ll be featuring two more RoboJackets involved in research. This will be our final volume of RoboResearch in the 2020-2021 school year.
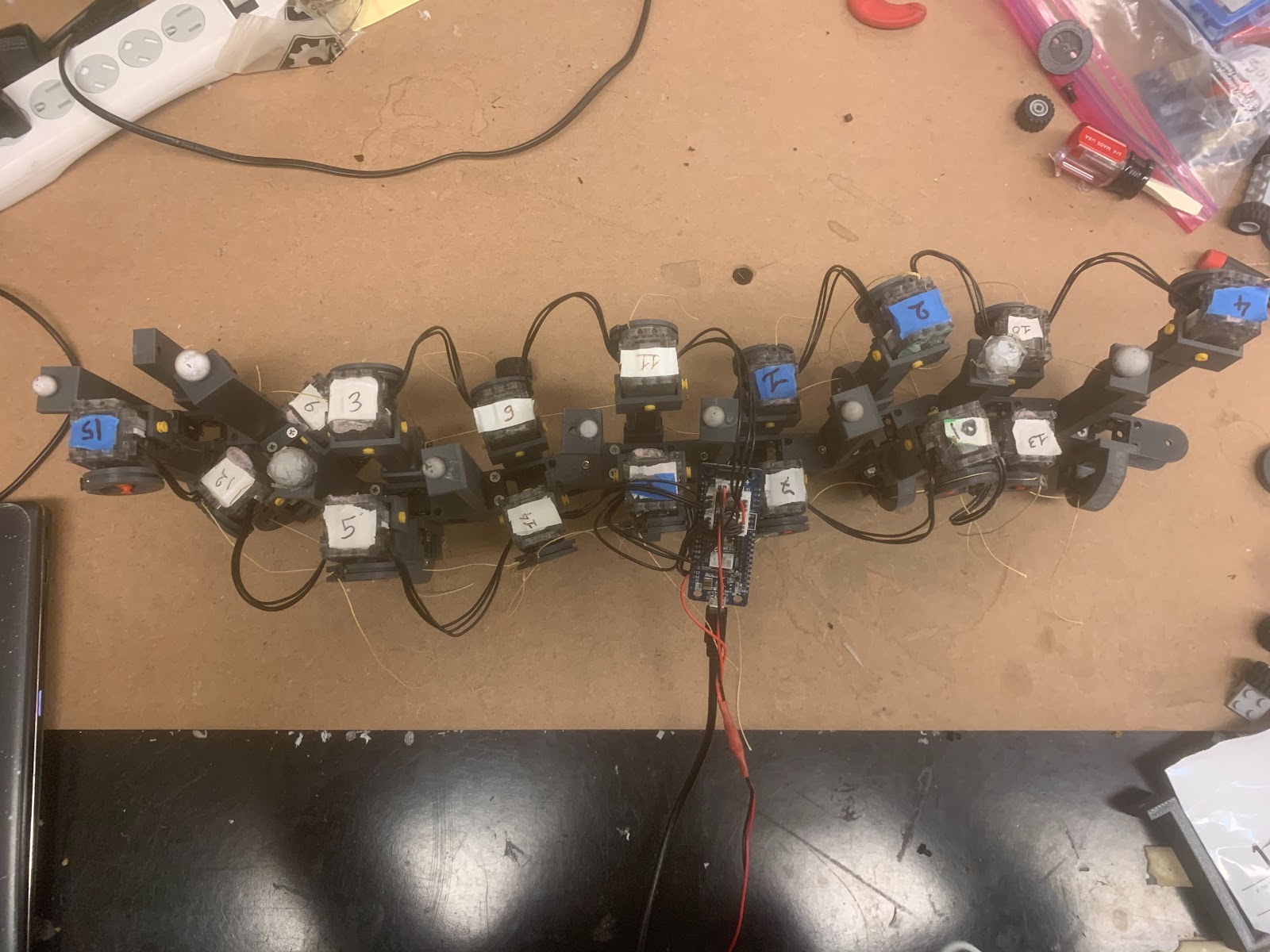
Marine Maisonneuve, featured in an earlier issue of the newsletter as the Project Manager of RoboCup, is involved with research on a robot designed to move like a snake. Based on biology research performed by graduate students about the locomotion of snakes, she conceived of, designed, built and programmed a limbless robot that passively deforms and redirects to avoid obstacles in its path as a part of the Complex Rheology and Biomechanics (CRAB) Lab, pictured above. She highlighted some of the ways that RoboJackets helps her in research: “RJ taught me to prototype, how to debug, quick fixes, etc. All of those basic skills that can be adapted to many different disciplines and projects.” She also emphasized that research led to her developing new skills that help her understand the progress of the mechatronics subteam she leads on RoboCup. Finally, she had this to say: “what also helped me is talking to my friends in RJ when I get stuck in research… their insight is usually very helpful.”
Jason Gibson is the last member we’ll be featuring this year. He is a PhD student and former President of RoboJackets. He does research as part of the Autonomous Control and Decision Systems Lab under Dr. Evangelos Theodorou. Jason is involved with a variety of projects under the singular umbrella of “game theoretic planning under uncertainty.” He explains:
Game theoretic planning means planning with other agents’ intent in mind. In game theory you model what the impact of your actions on others will be. A good example is a merging on a busy highway, I know that if I inch over the person in the other lane that is behind me will slow down because they don’t want to crash. A lot of AI decision making systems would not take that into account, they would assume that the other vehicle will continue to drive as normal no matter what I do.
Most of his research is centered around the AutoRally platform, a “1/5th scale autonomous RC car that is used for a lot of different research projects,” and was also designed and built primarily by RoboJackets students. Jason wears many hats in his research: “My responsibilities on the projects span everything from literature review and derivations to implementation of the new algorithms and hardware testing.” Additionally, he is in charge of all the undergraduates working on the project. He calls his experience with RoboJackets technical leadership “instrumental in how [he] work[s] with undergraduate students as the project lead. It was an easy transition from running the software team of [RoboNav] to what [he] currently do[es].”
We also wanted to end on a note about the relationship between RoboJackets and on campus research. As we’ve highlighted throughout these volumes of RoboResearch, RoboJackets are uniquely able to contribute to on campus research projects. We, again, asked Jason for his thoughts here, and he highlights what he sees as a gap in the Georgia Tech curriculum: “Certain majors give a solid mathematical education but lack practical applications of the core theory of robotics, others the opposite.” RoboJackets fills this gap by giving its members the ability to practice both skills in a project oriented environment. He continues: “In addition to [RoboJackets] being a boon for the [research] project they are working on, they gain specialized technical skills that benefit them personally and can also be applied back to [their work in RoboJackets].” He refers to a “symbiotic relationship between RoboJackets and robotics research” in which students learn practical skills from RoboJackets that they build on in research, and then bring back lessons learned from research. All in all, RoboJackets are uniquely suited to participate in practical robotics research, and we look forward to finding other opportunities where we can learn from each other.