

As part of RoboJackets, our members gain skills that serve them well in a variety of contexts, and academic research is no exception. We’d like to take this opportunity to highlight some of the research our members are involved in within the robotics space.
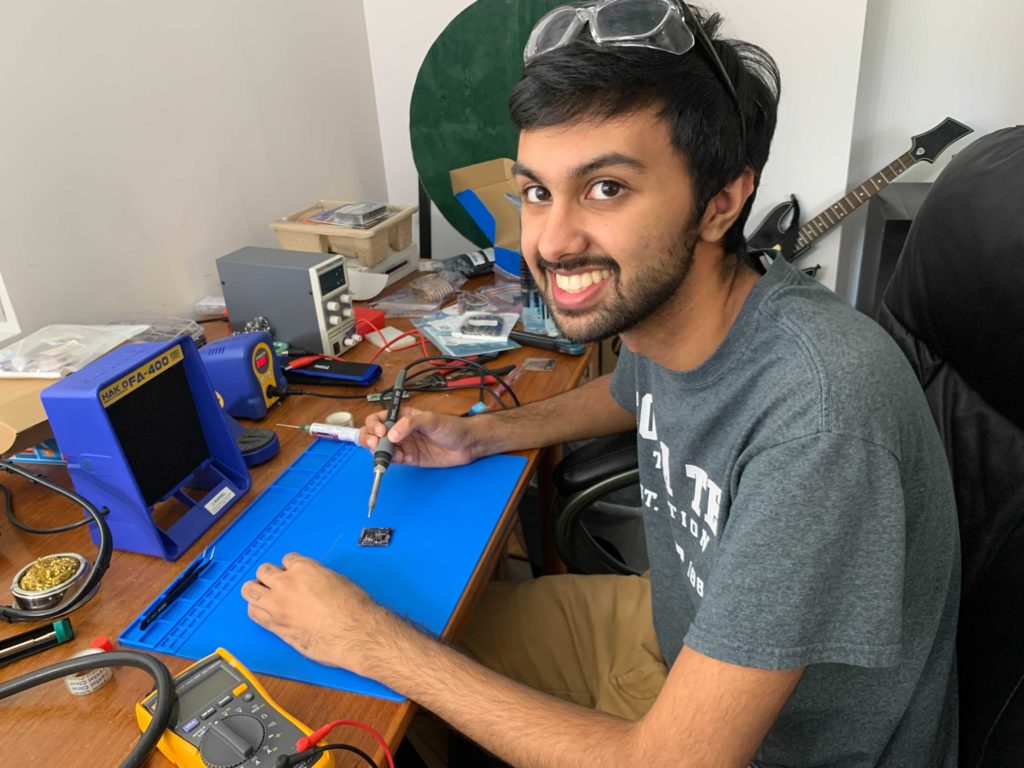
Varun Madabushi, well known for his contributions to electrical teams across RoboJackets, does research at the Dynamic Adaptive Robotic Technologies (DART) Lab. According to Varun, the lab works on “investigating mechanisms that allow more efficient robot locomotion along multiple terrains.” The robot he works on has swappable “propulsors,” IE mechanisms specifically suited for walking on any particular terrain. The robot swaps between “a 4-wheeled and 6-legged configuration [using] a robot arm which attaches and detaches the propulsors from the robot,” and stores the propulsors inside the robot while not in use. Varun’s responsibilities on the project are “testing and iterating on the leg, arm, and storage mechanisms… and controls for the arm and gait design for the 6-legged configuration.” You can see the robot Varun works on in action in the video below.
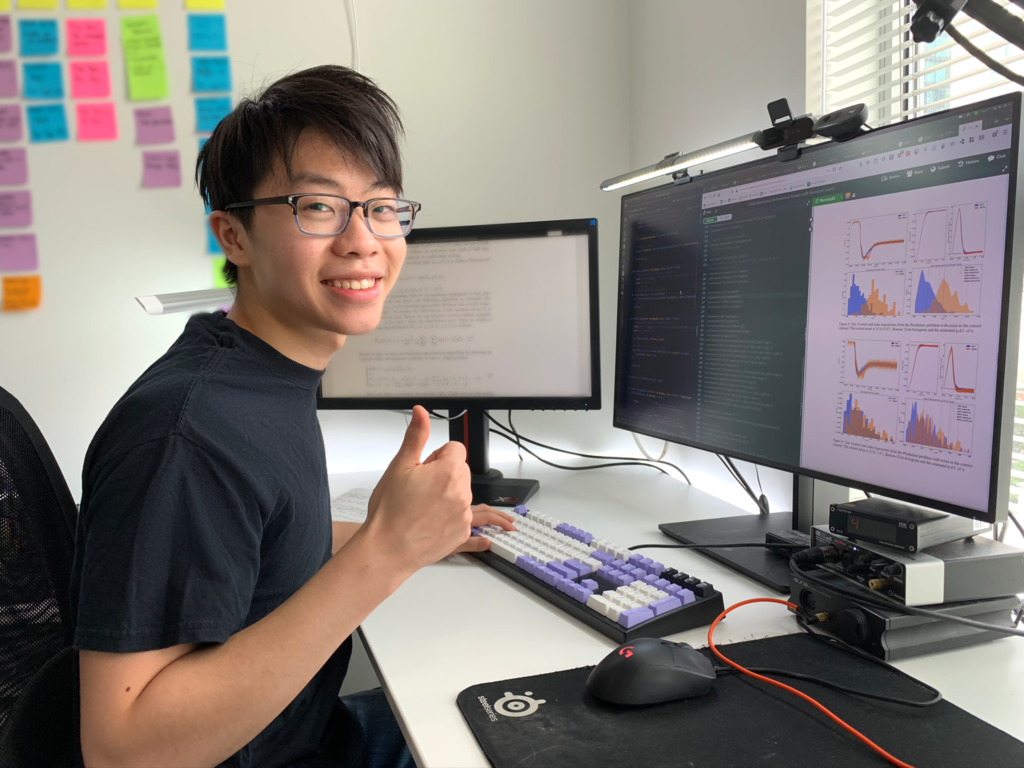
Oswin So, a software member who contributes to RoboNav and RoboCup’s software stacks, does his research at the Autonomous Control and Decision Systems Lab. The lab focuses on “stochastic optimal control,” a subset of control theory concerned with designing control paths that deal with randomness within systems. An optimal control path that minimizes risk is chosen using a cost function, which evaluates a given situation by looking at specific system parameters. Oswin’s current project is “control using different risk measures. While the majority of existing algorithms optimize for the mean of the disturbance [from the control path], ie. what the most likely outcome of the disturbance is, risk measures allow you to take into consideration different aspects of the uncertainty distribution.” He cites autonomous driving as an example for when these models can be utilized: “in safety-critical applications such as autonomous driving where lives are at stake, it makes more sense to consider events that are less likely to occur but might be catastrophic and result in the loss of human life. This may lead to [implementing control] policies that are less effective in the average case but have much better outcomes in rare, unexpected scenarios.”
These are just two cases of our members getting involved in research around the institute. Look forward to future issues in which we will feature other research our members participate in!