
RoboNav’s shift from IGVC to URC prompted the team to focus on finding solutions to new tasks requiring the robot to manipulate different objects such as rocks, tools and even an USB stick. To investigate these new components for the design of their rover, RoboNav’s mechanical team divided into 3 groups: the drive train, arm and end effector. Here, we take a look at the end effector, which the team uses to grasp different objects and tools.
While the end effector is physically a part of the arm, it often requires greater precision and careful design compared to the rest of the arm to be able to grasp and handle different objects. The development of the end effector first started out as a new member project in 2020, when the team first decided on attempting to compete in URC. During the 2020-2021 school year, the team experimented with various rough designs in CAD for what the end effector could look like. Progress slowed as the team shifted focus to get more people working on Swervi, but then continued with new members for 2021-2022.
Since then, the new members have designed newer prototypes of the end effector, iterating on different mechanisms for the claw. Gray Simmons, one of the mechanical team members working on the project, described their goals as picking up large objects, using various tools, pressing keys and flipping switches. To achieve these aims, they reached out to other URC teams about their designs and also did their own research on how to design a claw with precise control.


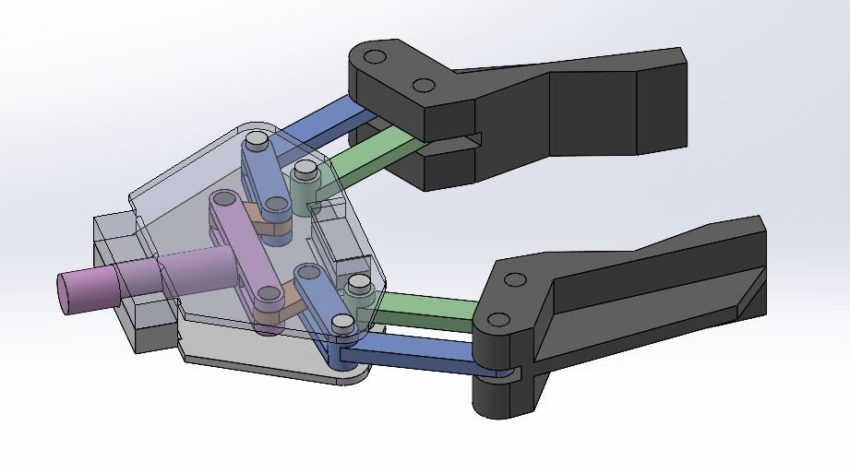
For the first iteration of the model, they “based the design heavily on using a Watt’s linkage system in order to control the claw with a linear motion input.” This served to showcase the mechanism at a smaller scale, making sure that the underlying principles hold when the full version of the end effector is built. They 3D printed this design using an SLA printer, confirming that the mechanism worked as they had intended.

Afterward, they moved to a design that was more manufacturable and tried to make it more mechanically sound for the full-scale model. While they haven’t had a design review yet, they integrated feedback from other RoboNav members, creating windows in the base plates to reduce the mass of the system. The primary changes between the two major iterations were a “focus on manufactured parts, the increase in size, and the addition of the lead screw to apply the vertical linear force.” This Spring, the team manufactured and assembled the end effector at its full scale, successfully obtaining a working version of their design.


For the future, RoboNav’s end effector team plans to focus on developing the claws at the tip of the end effector to be less rigid, incorporating a compliant claw system. Making the claws less rigid would allow the robot to get a better grip of objects, which is especially important due to the wide range of objects of different sizes that they need to pick up and manipulate. The design process for this change is currently underway, and the team hopes to have a functional compliant claw soon.