

RoboJacket’s newest team, RoboWrestling, participates in autonomous robotic sumo competitions, typically held in Tokyo, Japan. The goal of this competition, as is the case with real sumo wrestling, is to push an opposing robot out of the arena, referred to as the dohyō. When two robots face off, they compete in up to three matches. The first to win two matches is deemed the winner. One of the biggest differences between robot and human sumo is that in the robot version, the dohyō is made from a steel plate. These robots, like traditional human sumo participants, compete in separate weight classes with certain weight limits per class. RoboJackets generally only build sumo robots in the 3 kg weight class. To increase the robots’ effective weight (which is directly proportional to their ability to push), these bots have arrays of magnets on their undersides. This makes their effective weights on the steel arena up to hundreds of pounds, enabling them to push even humans around with ease.
RoboWrestling has two autonomous sumo robots they are designing this year: Guciii and Kirbii.
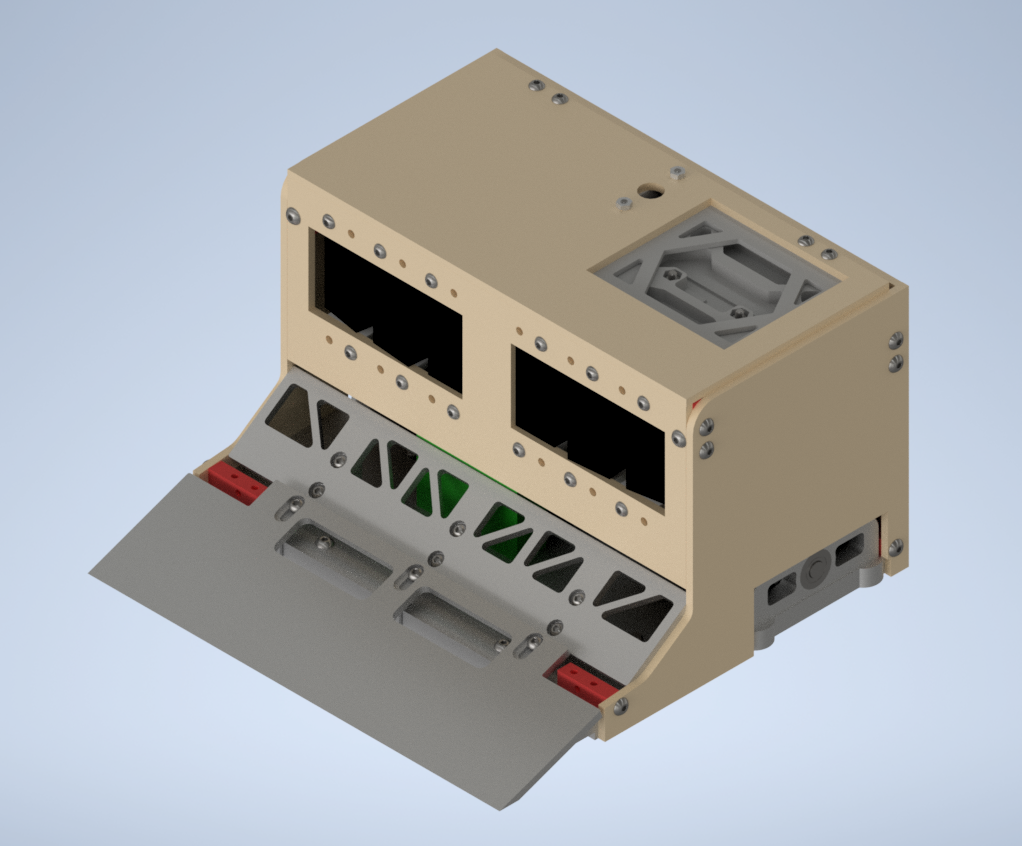
First up is Gucciii. The Gucci line marks a significant change in the design approach to RoboJackets sumo bots. Prior to Gucci, RoboJackets utilized worm gears because of their inability to be back driven and high gear ratios. Gucci was the first robot that switched from this approach to spur gears, which are used far more frequently in the sumo competition space. Gucciii is the latest version in this line of robots. The Gucci line uses a compound plow, with a lower plow at a gentle angle to more easily get under its competition, and a steeper plow up higher to wrench its opponent up further. Gucci’s drive gear ratio is 4:1, and its magnets provide 415 pounds of effective weight.

Next we have Kirbii. Kirbii is another step closer to the general robot design that most other sumo robots use. It has a simplified plow, and a larger magnet force than Gucciii at 450 lbs. It also has a much larger gear ratio of 8.75:1, which better enables the robot to utilize that magnet weight.
There has been extensive electrical developments of the two Sumo robots over the years. Both have a very similar sensor suite, with 6 LiDAR sensors pointed outward to find their opponents. LiDARs (from combining the words light and RADAR) shoot out laser pulses and measure the change in time for it to bounce back to determine how far away objects are. These sensors are commonly used in automotive technology for obstacle detection. There are also two line sensors at the front of the robots to detect markings on the dohyō to prevent accidentally leaving the arena by their own power. Both robots travel at a target speed of 2 m/s with the use of brushed motors, enabling them to cross the dohyō in a (literal) second. A new development for the team this year is the addition of a radio module that enables the robots to change strategies in between matches along with an Inertial Measurement Unit (IMU) for determining the orientation and acceleration of the robot.
An autonomous robot would hardly be autonomous without software. The software strategy may appear simple: use their sensors to lock onto their enemy and approach. As they get closer, they accelerate to ram and dislodge the enemy from the arena. However, matches occur in the matter of seconds, so the sensing and processing must occur much faster. Because the software stack must run so fast, it cannot run on “bulky” operating systems like Linux or Windows. The software stack runs on a Teensy, an ARM-based microcontroller that has processors that run much faster than many Arduinos. The software must both interact with the sensors on the low-level to gather information and execute high-level strategy and trajectories. The team is currently working on developing a simulator to further test and develop strategies.
The two designs were just recently reviewed by other mechanical and electrical teams in RoboJackets, and they are planned to be manufactured this year. We are tentatively planning to enter them into the All Japan Robot-Sumo Tournament in 2021, or any earlier competition we can find. We are excited to see how these designs evolve over the coming year!